{kind=link}







/* Program sensor warna Oleh : Aan Darmawan web : valfa.blogspot.com update : 25 Mei 2012 */ #include <Servo.h> Servo myservo; int sensorPin = A0; int LedBiru =3; // Led warna biru digital pin 3 int LedHijau=4; // Led warna hijau digital pin 4 int LedMerah=5; // Led warna merah digital pin 5 int hasil,hasilb,hasilm,hasilh; int k=8; // toleransi warna void setup() { // declare the ledPin as an OUTPUT: pinMode(LedBiru,OUTPUT); pinMode(LedMerah,OUTPUT); pinMode(LedHijau,OUTPUT); digitalWrite(LedBiru,LOW); digitalWrite(LedMerah,LOW); digitalWrite(LedHijau,LOW); myservo.attach(9); // motor servo pin digital 9 myservo.write(90); delay(100); Serial.begin(9600); delay(1000); } void loop() { // nyalakan LedMerah digitalWrite(LedMerah,HIGH); //delay 150 ms agar LDR baca stabil delay(150); // baca data sensor hasil= analogRead(sensorPin); hasilm=map(hasil,0,1023,0,255); Serial.print("R,G,B = "); Serial.print(hasilm); digitalWrite(LedMerah,LOW); delay(150); // nyalakan LedHijau digitalWrite(LedHijau,HIGH); //delay 150 ms agar LDR baca stabil delay(150); // baca data sensor hasil= analogRead(sensorPin); hasilh=map(hasil,0,1023,0,255); Serial.print(","); Serial.print(hasilh); digitalWrite(LedHijau,LOW); delay(150); // nyalakan LedBiru digitalWrite(LedBiru,HIGH); //delay 150 ms agar LDR baca stabil delay(150); // baca data sensor hasil= analogRead(sensorPin); hasilb=map(hasil,0,1023,0,255); Serial.print(","); Serial.println(hasilb); digitalWrite(LedBiru,LOW); delay(150); // cek warna dibandingkan dengan nilai hasil kalibrasi if(abs(hasilm-208)<k && abs(hasilh-203)<k && abs(hasilb-177)<k){ Serial.println(" -> WARNA PUTIH!\n"); myservo.write(10); } else if(abs(hasilm-209)<k && abs(hasilh-165)<k && abs(hasilb-139)<k){ Serial.println(" -> WARNA MERAH !\n"); myservo.write(30); } else if(abs(hasilm-135)<k && abs(hasilh-182)<k && abs(hasilb-147)<k){ Serial.println(" -> WARNA HIJAU !\n"); myservo.write(50); } else if(abs(hasilm-138)<k && abs(hasilh-163)<k && abs(hasilb-166)<k){ Serial.println(" -> WARNA BIRU !\n"); myservo.write(70); } else if(abs(hasilm-156)<k && abs(hasilh-184)<k && abs(hasilb-172)<k){ Serial.println(" -> WARNA CYAN !\n"); myservo.write(90); } else if(abs(hasilm-199)<k && abs(hasilh-159)<k && abs(hasilb-170)<k){ Serial.println(" -> WARNA UNGU !\n"); myservo.write(110); } else if(abs(hasilm-209)<k && abs(hasilh-214)<k && abs(hasilb-223)<k){ Serial.println(" -> WARNA KUNING !\n"); myservo.write(130); } else if(abs(hasilm-210)<k && abs(hasilh-206)<k && abs(hasilb-211)<k){ Serial.println(" -> WARNA PINK !\n"); myservo.write(150); } else if(abs(hasilm-165)<k && abs(hasilh-197)<k && abs(hasilb-205)<k){ Serial.println(" -> WARNA HIJAU MUDA !\n"); myservo.write(170); } else // if(abs(hasilm-209)<k && abs(hasilh-204)<k && abs(hasilb-210)<k){ // Serial.println(" -> WARNA KUNING MUDA!\n"); // myservo.write(180); } else Serial.println(" -> ???\n"); delay (2000); }---



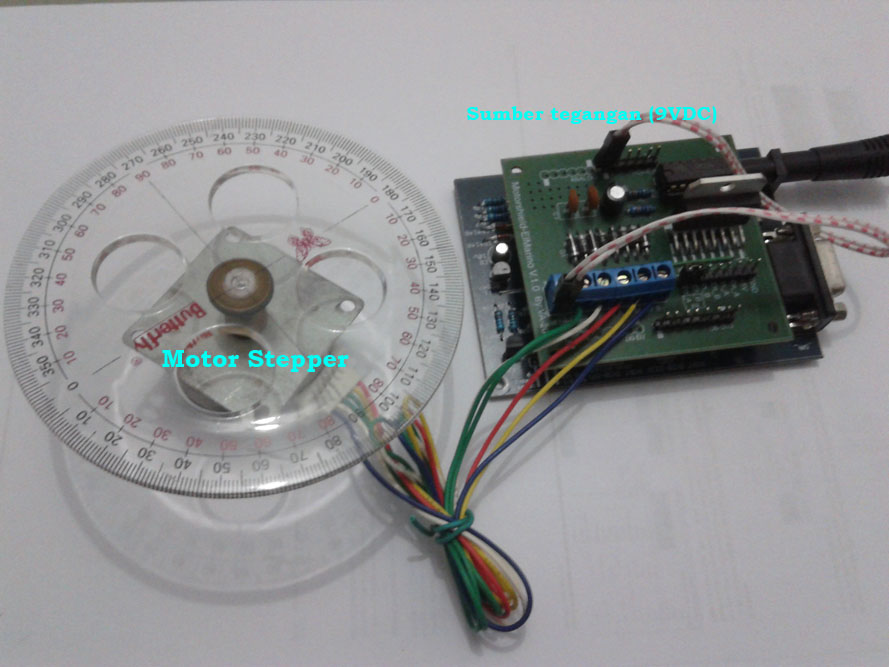
/* Kendali Stepper-motor dengan Motorshield Elmarino Pin 9 HIGH=Enable, LOW=Disable Pin 10,11 kendali Stepper Motor searah jarum jam (pin10 pin11): HL,HH,LH,LL berlawanan arah jarum jam (pin10 pin11): LL,LH,HH,HL Oleh : Aan Darmawan Blog : http://valfa.blogspot.com Date : 20 Maret 2011 */ void setup() { //Serial.begin(9600); pinMode(10,OUTPUT); // pin 10,11 Kendali Stepper Motor pinMode(11,OUTPUT); pinMode(9,OUTPUT); // Enable/Disable Stepper Motor digitalWrite(9,LOW); delay(1000); } int i; // main program void loop() { // putar searah jarum jam for(i=1;i<=250;i++){ digitalWrite(9,LOW); digitalWrite(10,HIGH); digitalWrite(11,LOW); digitalWrite(9,HIGH); delay(10); digitalWrite(9,LOW); digitalWrite(10,HIGH); digitalWrite(11,HIGH); digitalWrite(9,HIGH); delay(10); digitalWrite(9,LOW); digitalWrite(10,LOW); digitalWrite(11,HIGH); digitalWrite(9,HIGH); delay(10); digitalWrite(9,LOW); digitalWrite(10,LOW); digitalWrite(11,LOW); digitalWrite(9,HIGH); delay(10); } // putar berlawanan jarum jam for(i=1;i<=250;i++){ digitalWrite(9,LOW); digitalWrite(10,LOW); digitalWrite(11,LOW); digitalWrite(9,HIGH); delay(10); digitalWrite(9,LOW); digitalWrite(10,LOW); digitalWrite(11,HIGH); digitalWrite(9,HIGH); delay(10); digitalWrite(9,LOW); digitalWrite(10,HIGH); digitalWrite(11,HIGH); digitalWrite(9,HIGH); delay(10); digitalWrite(9,LOW); digitalWrite(10,HIGH); digitalWrite(11,LOW); digitalWrite(9,HIGH); delay(10); } }
Contoh Video Hasil uji coba:

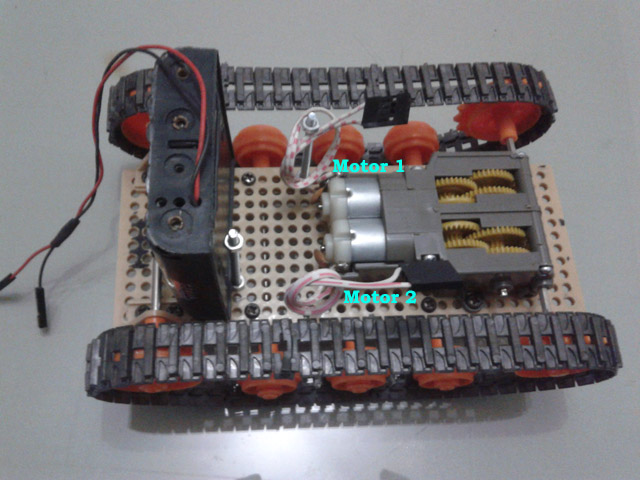





/* Kendali 2 motor DC dengan Motorshield Elmarino Pin 9 Enable/Disable sinyal PWM akan mengatur kecepatan putaran 0 Stop - 255 kecepatan maksimum Pin 10 Motor B -> HIGH=Forward, LOW=Backward Pin 11 Motor A -> HIGH=Forward, LOW=Backward Oleh : Aan Darmawan Blog : http://valfa.blogspot.com Date : 10 Maret 2011 */ void maju(int kecepatan){ digitalWrite(10,HIGH); digitalWrite(11,HIGH); analogWrite(9,kecepatan); } void mundur(int kecepatan){ digitalWrite(10,LOW); digitalWrite(11,LOW); analogWrite(9,kecepatan); } void henti(void){ analogWrite(9,0); } void putarkiri(int kecepatan){ digitalWrite(10,HIGH); digitalWrite(11,LOW); analogWrite(9,kecepatan); } void putarkanan(int kecepatan){ digitalWrite(10,LOW); digitalWrite(11,HIGH); analogWrite(9,kecepatan); } void setup() { //Serial.begin(9600); pinMode(10,OUTPUT); // Kendali Motor A pinMode(11,OUTPUT); // Kendali Motor B pinMode(9,OUTPUT); // Enable Motor (PWM ->Speed) delay(1000); } int n; // main program void loop() { // maju 2 detik maju(255); //kecepatan penuh delay(2000); henti(); delay(300); // mundur 2 detik mundur(255); //kecepatan penuh delay(2000); henti(); delay(300); // putar kiri putarkiri(155); //kecepatan ~60% delay(2000); henti(); delay(300); // putar kanan putarkanan(155); //kecepatan ~60% delay(2000); henti(); delay(300); }
Video Hasil Uji:
 |
| Serius...konsentrasi...santai dan narsis....... |
 |